最終更新日
2025/10/03
AI制御による不整地運搬車(クローラキャリア)の自動走行技術 10014697
H1152 株式会社熊谷組
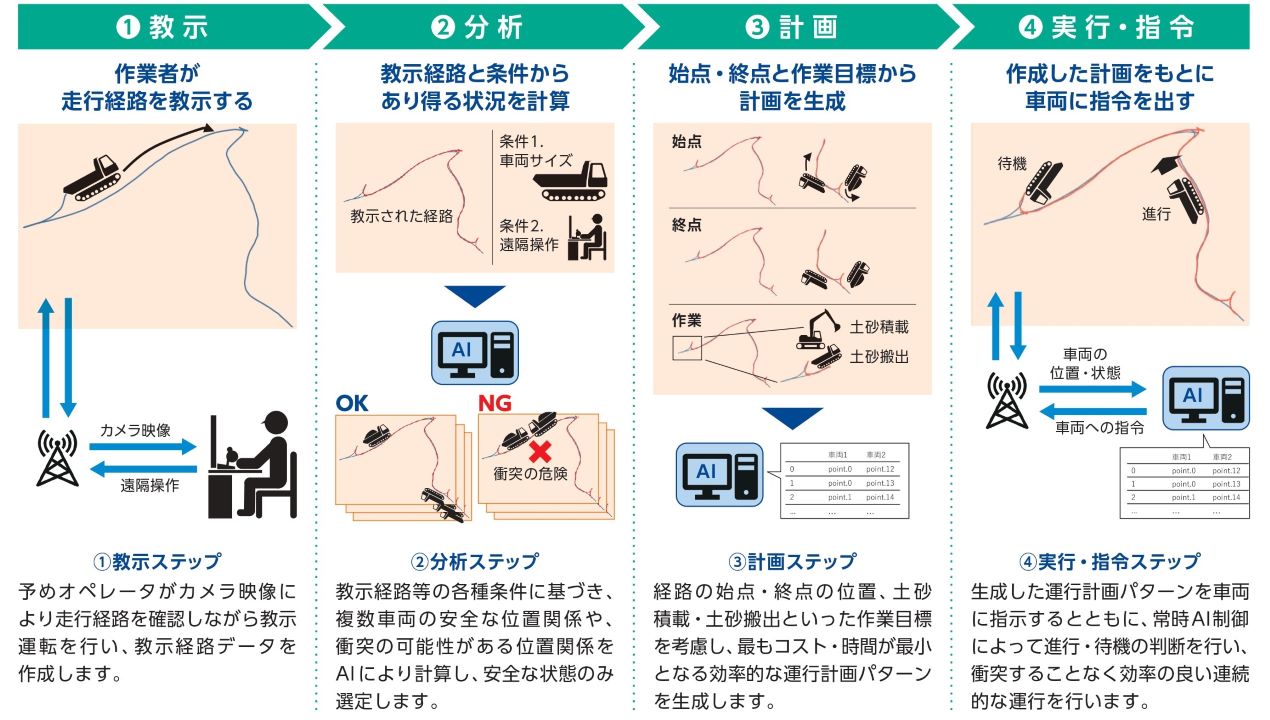
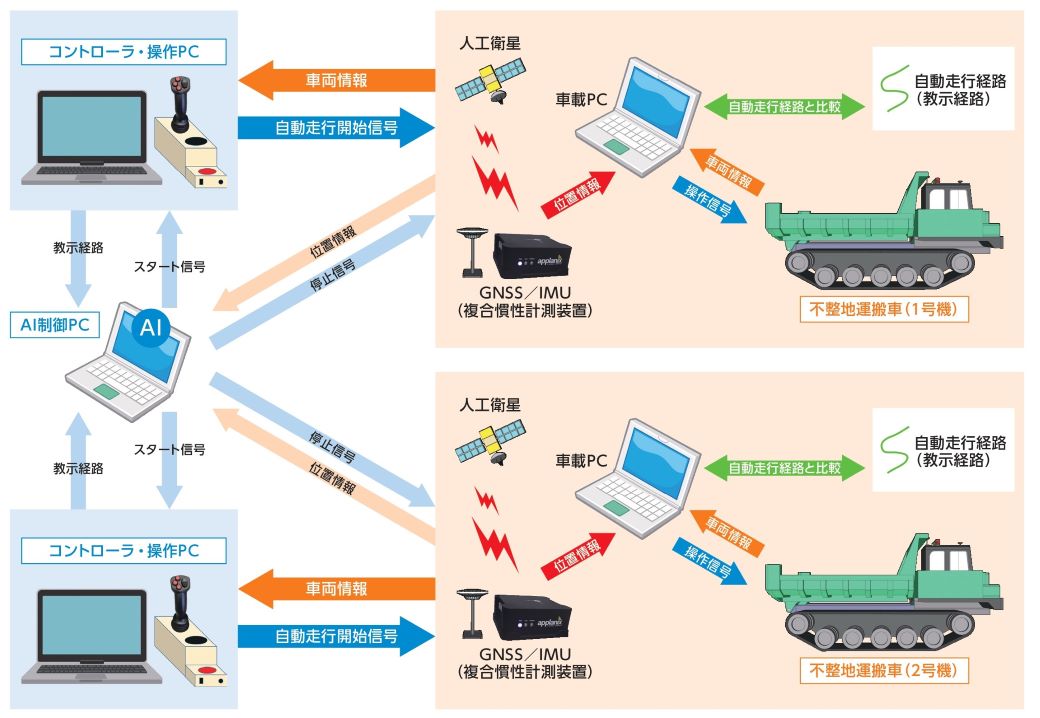
AI制御による不整地運搬車の自動走行技術は、教示運転で走行ルートを設定した単独の不整地運搬車に対し、さらにAIによる制御を組み合わせた技術です。
この技術により、2台以上の車両のスムーズな運行と、PCによる省人化が可能になります。従来の手法では、バックホウ1台と不整地運搬車2台の作業には2名のオペレータが必要でしたが、AI制御により1名のオペレータでの作業を実現しました。
この自動走行技術は、阿蘇大橋地区斜面対策工事の現場で実施工に導入されました。
また、令和6年能登半島地震における国道249号啓開作業その2工事でも活用されています。この現場では、頭部から麓までの土砂運搬作業を自動化しました。急峻な地形による狭隘な工事用道路、降雨や降雪による地盤の軟弱化、さらには夜間施工という厳しい条件下においても、本技術の導入によって冬季作業の安全性向上と省力化が実現し、土砂運搬作業の効率化が図られました。
 自動走行による作業
自動走行による作業
 AI制御フロー
AI制御フロー
 AI制御システム
AI制御システム

AI制御による不整地運搬車(クローラキャリア)の自動走行技術
| 技術の概要・特徴 |
AI制御による不整地運搬車の自動走行技術は、教示運転で走行ルートを設定した単独の不整地運搬車に対し、さらにAIによる制御を組み合わせた技術です。 この技術により、2台以上の車両のスムーズな運行と、PCによる省人化が可能になります。従来の手法では、バックホウ1台と不整地運搬車2台の作業には2名のオペレータが必要でしたが、AI制御により1名のオペレータでの作業を実現しました。 この自動走行技術は、阿蘇大橋地区斜面対策工事の現場で実施工に導入されました。 また、令和6年能登半島地震における国道249号啓開作業その2工事でも活用されています。この現場では、頭部から麓までの土砂運搬作業を自動化しました。急峻な地形による狭隘な工事用道路、降雨や降雪による地盤の軟弱化、さらには夜間施工という厳しい条件下においても、本技術の導入によって冬季作業の安全性向上と省力化が実現し、土砂運搬作業の効率化が図られました。 |
|---|---|
| 技術の仕様 |
●積込機械オペレータの負担軽減 バックホウ積込みや整地などの作業に専念できます。 ●運搬機械の負荷低減 運搬機械の速度を平準化するため、燃費効率が向上します。 ●運行監視要員の削減 AIの運行制御により、不整地運搬車の衝突等の安全確認作業が不要となり、運行監視要員の削減につながります。 ●運搬機械同士の接触事故防止 専用のセンサーがなくても、AIで運行制御するため、接触を防止できます。 ●土砂運搬作業における生産性向上 1名のオペレータで3台の建設機械を操作することができ、作業の省力化、生産性の向上が図れます。 ●経路が複雑かつ長距離化に対応 AIで運行制御するため、経路が複雑かつ長距離なものでも対応可能となります。 |
| 特許情報 | - |
| 現場適用条件 | - |
| 採用実績 | 九州地方整備局熊本復興事務所:阿蘇大橋地区斜面対策工事、北陸地方整備局能登復興事務所:国道249号啓開作業その2工事 |
| 単独開発/共同開発 | - |
■新技術に関するお問い合わせ情報
| 会社・部署(担当) |
株式会社熊谷組
新技術一覧
土木事業本部土木技術統括部土木DX推進部 飛鳥馬 翼 |
|---|---|
| 住所 |
〒162-2855 東京都新宿区津久戸町 2-1 |
| TEL | - |
| FAX | - |